
Page 281 - Gear Technology Solutions
P. 281
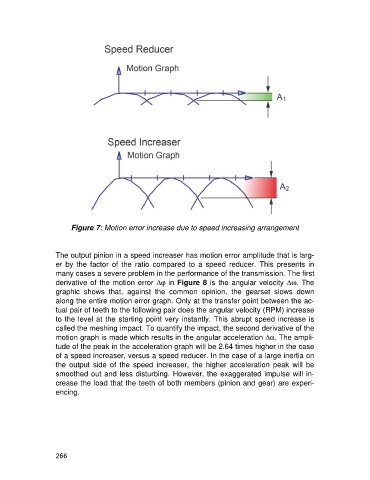
Figure 7: Motion error increase due to speed increasing arrangement
The output pinion in a speed increaser has motion error amplitude that is larg-
er by the factor of the ratio compared to a speed reducer. This presents in
many cases a severe problem in the performance of the transmission. The first
derivative of the motion error Djin Figure 8 is the angular velocity Dw. The
graphic shows that, against the common opinion, the gearset slows down
along the entire motion error graph. Only at the transfer point between the ac-
tual pair of teeth to the following pair does the angular velocity (RPM) increase
to the level at the starting point very instantly. This abrupt speed increase is
called the meshing impact. To quantify the impact, the second derivative of the
motion graph is made which results in the angular acceleration Da. The ampli-
tude of the peak in the acceleration graph will be 2.64 times higher in the case
of a speed increaser, versus a speed reducer. In the case of a large inertia on
the output side of the speed increaser, the higher acceleration peak will be
smoothed out and less disturbing. However, the exaggerated impulse will in-
crease the load that the teeth of both members (pinion and gear) are experi-
encing.
266